TUGAS BESAR (LINE FOLLOWER)
1. Pendahuluan[kembali]
Line follower adalah robot yang bisa mengikuti jalur lintasan berupa garis. Robot ini biasanya menggunakan sensor untuk membaca garis tersebut sebagai penunjuk arah bergerak. Garis ini bisa dibuat di atas permukaan datar dan biasanya berwarna hitam di atas latar belakang yang lebih terang.
Line follower bisa sederhana atau kompleks tergantung pada fungsinya. Robot line follower yang sederhana biasanya hanya bisa mengikuti garis yang cukup jelas dan tidak bercabang. Sedangkan robot line follower yang lebih canggih bisa melacak garis yang lebih rumit, bercabang, atau bahkan berubah warna.
2. Tujuan[kembali]
- Dapat memaham penggunaan line follower dalam kehidupan sehari-hari.
- Dapat membuat rangkaian line follower dengan baik dan benar.
- Memahami komponen-komponen yang akan digunakan.
3. Alat dan Bahan[kembali]
a). Alat
1). Power Supply
 Power Supply atau dalam bahasa Indonesia disebut dengan Catu Daya adalah suatu alat listrik yang dapat menyediakan energi listrik untuk perangkat listrik ataupun elektronika lainnya.
Power Supply atau dalam bahasa Indonesia disebut dengan Catu Daya adalah suatu alat listrik yang dapat menyediakan energi listrik untuk perangkat listrik ataupun elektronika lainnya.
Spesifikasi:



2). DC Voltmeter

b). Komponen


2. Dioda

Spesifikasi dioda

3. Transistor
Konfigurasi pin
4. Relay

Spesifikasi

Konfigurasi pin


- Integrated with two Op-Amps in a single package
- Wide power supply Range
- Single supply – 3V to 32V
- Dual supply – ±1.5V to ±16V
- Low Supply current – 700uA
- Single supply for two op-amps enables reliable operation
- Short circuit protected outputs
- Operating ambient temperature – 0˚C to 70˚C
- Soldering pin temperature – 260 ˚C (for 10 seconds – prescribed)
- Available packages: TO-99, CDIP, DSBGA, SOIC, PDIP, DSBGA


Spesifikasi Motor DC
Konfigurasi motor DC:

7. Potensiometer

8. Ground


- Tegangan maksimum (DC): 150V.
- Konsumsi arus maksimum: 100mW.
- Tingkatan Resistansi/Tahanan : 10Ω sampai 100KΩ
- Puncak spektral: 540nm (ukuran gelombang cahaya)
- Waktu Respon Sensor : 20ms – 30ms.



- Board Power Supply: 3 – 5 V
- Range: 2cm to 30cm
- Angle: 35 degrees
- Power LED: Illuminates when power is applied
- Obstacle LED: Illuminates when obstacle is detected
- Distance Adjust: Adjust detection distance. CCW decreases distance. CW increases distance.
- VCC : 3V - 12V Power Supply (Can directly connect to 5V or 3.3V micrcontroller)
- GND : Connect to GND
- OUT : Board digital output interface (0 and 1)

11. Touch Sensor

Spesifikasi :
- Tegangan kerja: 2v s/d 5.5v (optimal 3v)
- Output high VOH: 0.8VCC (typical)
- Output low VOL: 0.3VCC (max)
- Arus Output Pin Sink (@ VCC 3V, VOL 0.6V): 8mA
- Arus Output pin pull-up (@ VCC=3V, VOH=2.4V): 4mA
- Waktu respon (low power mode): max 220ms
- Waktu respon (touch mode): max 60ms
- Ukuran: 24x24x7.2mm


4. Dasar Teori[kembali]
1. Resistor
Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkain elektronika. Sebagaimana fungsi resistor yang sesuai namanya bersifat resistif dan termasuk salah satu komponen elektronika dalam kategori komponen pasif. Satuan atau nilai resistansi suatu resistor di sebut Ohm dan dilambangkan dengan simbol Omega (Ω). Sesuai hukum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Selain nilai resistansinya (Ohm) resistor juga memiliki nilai yang lain seperti nilai toleransi dan kapasitas daya yang mampu dilewatkannya. Semua nilai yang berkaitan dengan resistor tersebut penting untuk diketahui dalam perancangan suatu rangkaian elektronika oleh karena itu pabrikan resistor selalu mencantumkan dalam kemasan resistor tersebut.
Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkain elektronika. Sebagaimana fungsi resistor yang sesuai namanya bersifat resistif dan termasuk salah satu komponen elektronika dalam kategori komponen pasif. Satuan atau nilai resistansi suatu resistor di sebut Ohm dan dilambangkan dengan simbol Omega (Ω). Sesuai hukum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Selain nilai resistansinya (Ohm) resistor juga memiliki nilai yang lain seperti nilai toleransi dan kapasitas daya yang mampu dilewatkannya. Semua nilai yang berkaitan dengan resistor tersebut penting untuk diketahui dalam perancangan suatu rangkaian elektronika oleh karena itu pabrikan resistor selalu mencantumkan dalam kemasan resistor tersebut.
Simbol Resistor Sebagai Berikut :

Resistor dalam suatu teori dan penulisan formula yang berhubungan dengan resistor disimbolkan dengan huruf “R”. Kemudian pada desain skema elektronika resistor tetap disimbolkan dengan huruf “R”, resistor variabel disimbolkan dengan huruf “VR” dan untuk resistorjenis potensiometer ada yang disimbolkan dengan huruf “VR” dan “POT”.
Resistor dalam suatu teori dan penulisan formula yang berhubungan dengan resistor disimbolkan dengan huruf “R”. Kemudian pada desain skema elektronika resistor tetap disimbolkan dengan huruf “R”, resistor variabel disimbolkan dengan huruf “VR” dan untuk resistorjenis potensiometer ada yang disimbolkan dengan huruf “VR” dan “POT”.
Kapasitas Daya Resistor
Kapasitas daya pada resistor merupakan nilai daya maksimum yang mampu dilewatkan oleh resistor tersebut. Nilai kapasitas daya resistor ini dapat dikenali dari ukuran fisik resistor dan tulisan kapasitas daya dalamsatuan Watt untuk resistor dengan kemasan fisik besar. Menentukan kapasitas daya resistor ini penting dilakukan untuk menghindari resistor rusak karena terjadi kelebihan daya yang mengalir sehingga resistor terbakar dan sebagai bentuk efisiensi biaya dan tempat dalam pembuatan rangkaian elektronika.
Kapasitas daya pada resistor merupakan nilai daya maksimum yang mampu dilewatkan oleh resistor tersebut. Nilai kapasitas daya resistor ini dapat dikenali dari ukuran fisik resistor dan tulisan kapasitas daya dalamsatuan Watt untuk resistor dengan kemasan fisik besar. Menentukan kapasitas daya resistor ini penting dilakukan untuk menghindari resistor rusak karena terjadi kelebihan daya yang mengalir sehingga resistor terbakar dan sebagai bentuk efisiensi biaya dan tempat dalam pembuatan rangkaian elektronika.
Nilai Toleransi Resistor
Toleransi resistor merupakan perubahan nilai resistansi dari nilai yang tercantum pada badan resistor yang masih diperbolehkan dan dinyatakan resistor dalam kondisi baik. Toleransi resistor merupakan salah satu perubahan karakteristik resistor yang terjadi akibat operasional resistor tersebut. Nilai torleransi resistor ini ada beberapa macam yaitu resistor dengan toleransi kerusakan 1% (resistor 1%), resistor dengan toleransi kesalahan 2% (resistor2%), resistor dengan toleransi kesalahan 5% (resistor 5%) dan resistor dengan toleransi 10% (resistor 10%).
Nilai toleransi resistor ini selalu dicantumkan di kemasan resistor dengan kode warna maupun kode huruf. Sebagai contoh resistor dengan toleransi 5% maka dituliskan dengan kode warna pada cincin ke 4 warna emas atau dengan kode huruf J pada resistor dengan fisik kemasan besar. Resistor yang banyak dijual dipasaran pada umumnya resistor 5% dan resistor 1%.
Toleransi resistor merupakan perubahan nilai resistansi dari nilai yang tercantum pada badan resistor yang masih diperbolehkan dan dinyatakan resistor dalam kondisi baik. Toleransi resistor merupakan salah satu perubahan karakteristik resistor yang terjadi akibat operasional resistor tersebut. Nilai torleransi resistor ini ada beberapa macam yaitu resistor dengan toleransi kerusakan 1% (resistor 1%), resistor dengan toleransi kesalahan 2% (resistor2%), resistor dengan toleransi kesalahan 5% (resistor 5%) dan resistor dengan toleransi 10% (resistor 10%).
Nilai toleransi resistor ini selalu dicantumkan di kemasan resistor dengan kode warna maupun kode huruf. Sebagai contoh resistor dengan toleransi 5% maka dituliskan dengan kode warna pada cincin ke 4 warna emas atau dengan kode huruf J pada resistor dengan fisik kemasan besar. Resistor yang banyak dijual dipasaran pada umumnya resistor 5% dan resistor 1%.
Jenis-Jenis Resistor
Berdasarkan jenis dan bahan yang digunakan untuk membuat resistor dibedakan menjadi resistor kawat, resistor arang dan resistor oksida logam atau resistor metal film.
Berdasarkan jenis dan bahan yang digunakan untuk membuat resistor dibedakan menjadi resistor kawat, resistor arang dan resistor oksida logam atau resistor metal film.
Resistor Kawat (Wirewound Resistor)
Resistor kawat atau wirewound resistor merupakan resistor yang dibuat dengan bahat kawat yang dililitkan. Sehingga nilai resistansiresistor ditentukan dari panjangnya kawat yang dililitkan. Resistor jenis ini pada umumnya dibuat dengan kapasitas daya yang besar.
Resistor kawat atau wirewound resistor merupakan resistor yang dibuat dengan bahat kawat yang dililitkan. Sehingga nilai resistansiresistor ditentukan dari panjangnya kawat yang dililitkan. Resistor jenis ini pada umumnya dibuat dengan kapasitas daya yang besar.
Resistor Arang (Carbon Resistor)
Resistor arang atau resistor karbon merupakan resistor yang dibuat dengan bahan utama batang arang atau karbon. Resistor karbon ini merupakan resistor yang banyak digunakan dan banyak diperjual belikan. Dipasaran resistor jenis ini dapat kita jumpai dengan kapasitas daya 1/16 Watt, 1/8 Watt, 1/4 Watt, 1/2 Watt, 1 Watt, 2 Watt dan 3 Watt.
Resistor arang atau resistor karbon merupakan resistor yang dibuat dengan bahan utama batang arang atau karbon. Resistor karbon ini merupakan resistor yang banyak digunakan dan banyak diperjual belikan. Dipasaran resistor jenis ini dapat kita jumpai dengan kapasitas daya 1/16 Watt, 1/8 Watt, 1/4 Watt, 1/2 Watt, 1 Watt, 2 Watt dan 3 Watt.
Resistor Oksida Logam (Metal Film Resistor)
Resistor oksida logam atau lebih dikenal dengan nama resistor metal film merupakan resistor yang dibuah dengan bahan utama oksida logam yang memiliki karakteristik lebih baik. Resistor metal film ini dapat ditemui dengan nilai tolerasni 1% dan 2%. Bentuk fisik resistor metal film ini mirip denganresistor kabon hanya beda warna dan jumlah cicin warna yang digunakan dalam penilaian resistor tersebut. Sama seperti resistorkarbon, resistor metal film ini juga diproduksi dalam beberapa kapasitas daya yaitu 1/8 Watt, 1/4 Watt, 1/2 Watt. Resistor metal film ini banyak digunakan untuk keperluan pengukuran, perangkat industri dan perangkat militer.
Kemudian berdasarkan nilai resistansinya resistor dibedakan menjadi 2 jenis yaitu resistor tetap (Fixed Resistor) dan resistor tidak tetap (Variable Resistor)
Resistor oksida logam atau lebih dikenal dengan nama resistor metal film merupakan resistor yang dibuah dengan bahan utama oksida logam yang memiliki karakteristik lebih baik. Resistor metal film ini dapat ditemui dengan nilai tolerasni 1% dan 2%. Bentuk fisik resistor metal film ini mirip denganresistor kabon hanya beda warna dan jumlah cicin warna yang digunakan dalam penilaian resistor tersebut. Sama seperti resistorkarbon, resistor metal film ini juga diproduksi dalam beberapa kapasitas daya yaitu 1/8 Watt, 1/4 Watt, 1/2 Watt. Resistor metal film ini banyak digunakan untuk keperluan pengukuran, perangkat industri dan perangkat militer.
Kemudian berdasarkan nilai resistansinya resistor dibedakan menjadi 2 jenis yaitu resistor tetap (Fixed Resistor) dan resistor tidak tetap (Variable Resistor)
Resistor Tetap(Fixed Resistor)
Resistor tetap merupakan resistor yang nilai resistansinya tidap dapat diubah atau tetap. Resistor jenis ini biasa digunakan dalam rangkaian elektronika sebagai pembatas arus dalam suatu rangkaian elektronika. Resistor tetap dapat kita temui dalam beberpa jenis, seperti :
- Metal Film Resistor
- Metal Oxide Resistor
- Carbon Film Resistor
- Ceramic Encased Wirewound
- Economy Wirewound
- Zero Ohm Jumper Wire
- S I P Resistor Network
Resistor tetap merupakan resistor yang nilai resistansinya tidap dapat diubah atau tetap. Resistor jenis ini biasa digunakan dalam rangkaian elektronika sebagai pembatas arus dalam suatu rangkaian elektronika. Resistor tetap dapat kita temui dalam beberpa jenis, seperti :
- Metal Film Resistor
- Metal Oxide Resistor
- Carbon Film Resistor
- Ceramic Encased Wirewound
- Economy Wirewound
- Zero Ohm Jumper Wire
- S I P Resistor Network
Resistor Tidak Tetap (Variable Resistor)
Resistor tidak tetap atau variable resistor terdiridari 2 tipe yaitu :
- Pontensiometer, tipe variable resistor yang dapat diatur nilai resistansinya secara langsung karena telah dilengkapi dengan tuas kontrol. Potensiometer terdiri dari 2 jenis yaitu Potensiometer Linier dan Potensiometer Logaritmis
- Trimer Potensiometer, yaitu tipe variable resistor yang membutuhkan alat bantu (obeng) dalam mengatur nilai resistansinya. Pada umumnya resistor jenis ini disebut dengan istilah “Trimer Potensiometer atau VR”
- Thermistor, yaitu tipe resistor variable yangnilairesistansinya akan berubah mengikuti suhu disekitar resistor. Thermistor terdiri dari 2 jenis yaitu NTC dan PTC. Untuk lebih detilnya thermistor akan dibahas dalam artikel yang lain.
- LDR (Light Depending Resistor), yaitu tipe resistor variabel yang nilai resistansinya akan berubah mengikuti cahaya yang diterima oleh LDR tersebut.
Jenis-jenis resistor tetap dan variable diatas akan dibahas lebih detil dalam artikel yang lain.
Resistor tidak tetap atau variable resistor terdiridari 2 tipe yaitu :
- Pontensiometer, tipe variable resistor yang dapat diatur nilai resistansinya secara langsung karena telah dilengkapi dengan tuas kontrol. Potensiometer terdiri dari 2 jenis yaitu Potensiometer Linier dan Potensiometer Logaritmis
- Trimer Potensiometer, yaitu tipe variable resistor yang membutuhkan alat bantu (obeng) dalam mengatur nilai resistansinya. Pada umumnya resistor jenis ini disebut dengan istilah “Trimer Potensiometer atau VR”
- Thermistor, yaitu tipe resistor variable yangnilairesistansinya akan berubah mengikuti suhu disekitar resistor. Thermistor terdiri dari 2 jenis yaitu NTC dan PTC. Untuk lebih detilnya thermistor akan dibahas dalam artikel yang lain.
- LDR (Light Depending Resistor), yaitu tipe resistor variabel yang nilai resistansinya akan berubah mengikuti cahaya yang diterima oleh LDR tersebut.
Jenis-jenis resistor tetap dan variable diatas akan dibahas lebih detil dalam artikel yang lain.
Menghitung Nilai Resistor
Nilai resistor dapat diketahui dengan kode warna dan kode huruf pada resistor. Resistor dengan nilai resistansi ditentukan dengan kode warna dapat ditemukan pada resistor tetap dengan kapasitas daya rendah, sedangkan nilai resistor yang ditentukan dengan kode huruf dapat ditemui pada resistor tetap daaya besar dan resistor variable.
Nilai resistor dapat diketahui dengan kode warna dan kode huruf pada resistor. Resistor dengan nilai resistansi ditentukan dengan kode warna dapat ditemukan pada resistor tetap dengan kapasitas daya rendah, sedangkan nilai resistor yang ditentukan dengan kode huruf dapat ditemui pada resistor tetap daaya besar dan resistor variable.
Kode Warna Resistor
Cicin warna yang terdapat pada resistor terdiri dari 4 ring 5 dan 6 ring warna. Dari cicin warna yang terdapat dari suatu resistor tersebut memiliki arti dan nilai dimana nilai resistansi resistor dengan kode warna yaitu :

Cicin warna yang terdapat pada resistor terdiri dari 4 ring 5 dan 6 ring warna. Dari cicin warna yang terdapat dari suatu resistor tersebut memiliki arti dan nilai dimana nilai resistansi resistor dengan kode warna yaitu :
Resistor Dengan 4 Cincin Kode Warna
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
Resistor Dengan 5 Cincin Kode Warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
Resistor Dengan 6 Cincin Warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
Kode Huruf Resistor
Resistor dengan kode huruf dapat kita baca nilai resistansinya dengan mudah karenanilia resistansi dituliskan secara langsung. Pad umumnya resistor yang dituliskan dengan kode huruf memiliki urutan penulisan kapasitas daya, nilai resistansi dan toleransi resistor. Kode huruf digunakan untuk penulisan nilai resistansi dan toleransi resistor.

Kode Huruf Untuk Nilai Resistansi :
- R, berarti x1 (Ohm)
- K, berarti x1000 (KOhm)
- M, berarti x 1000000 (MOhm)
Kode Huruf Untuk Nilai Toleransi :
- F, untuk toleransi 1%
- G, untuk toleransi 2%
- J, untuk toleransi 5%
- K, untuk toleransi 10%
- M, untuk toleransi 20%
Rumus Resistor:
Resistor dengan kode huruf dapat kita baca nilai resistansinya dengan mudah karenanilia resistansi dituliskan secara langsung. Pad umumnya resistor yang dituliskan dengan kode huruf memiliki urutan penulisan kapasitas daya, nilai resistansi dan toleransi resistor. Kode huruf digunakan untuk penulisan nilai resistansi dan toleransi resistor.
Kode Huruf Untuk Nilai Resistansi :
- R, berarti x1 (Ohm)
- K, berarti x1000 (KOhm)
- M, berarti x 1000000 (MOhm)
Kode Huruf Untuk Nilai Toleransi :
- F, untuk toleransi 1%
- G, untuk toleransi 2%
- J, untuk toleransi 5%
- K, untuk toleransi 10%
- M, untuk toleransi 20%
Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :

Dimana V adalah tegangan, I adalah kuat arus, dan R adalah Hambatan
Mencari resistansi total dalam rangkaian dapat menggunakan :Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
2. Dioda
Dioda atau disebut juga sinyal dioda adalah komponen dasar semikonduktor aktif yang hanya bisa mengalirkan arus satu arah saja (forward bias) yaitu dari arah positip (Anoda) ke arah negatif (Katoda) namun memblok arus untuk arah sebaliknya. Dalam rangkaian elektronika dioda diibaratkan sebagai kran/katup listrik satu arah. Dioda memiliki dua elektroda yaitu elektroda positip (Anoda) dan elektroda negatif (Katoda). Secara umum dioda biasa dipakai untuk merubah arus bolak-balik (AC) menjadi arus searah (DC) atau disebut sebagai Rectifier.
Dioda dibuat dari bahan semikonduktor seperti germanium (Ge), Silicon (Si) dan galium arsenide (GaAs), sifat listrik pada jenis material tersebut ialah menengah atau dengan kata lain tidak baik sebagai konduktor dan tidak baik juga sebagai insulator, sifat ini dinamakan semikonduktor.
Material semikonduktor memiliki sangat sedikit "elektron bebas" karena molekul atomnya terkumpul bersama dalam bentuk pola kristal yang sering disebut "kisi kristal". Untuk meningkatkan daya hantar listrik pada material ini maka perlu dicampurkan "kotoran atom" pada struktur kristalnya sehingga menghasilkan lebih banyak elektron bebas dan lubang atom. Untuk menghasilkan sisi Negatif (katoda) pada dioda maka material semikonduktor biasanya dicampurkan kotoran atom dengan bahan seperti: Arsenik, Antimony atau Fosfor. dan untuk menghasilkan sisi positip (Anoda) dicampur dengan kotoran atom dari bahan Aluminium, Boron atau Galium.
Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
JENIS DAN SIMBOL DIODA
Seperti penjelasan diatas, Jenis dioda tergantung dari bahan material yang dipakai saat pembuatannya, dibawah ini adalah contoh gambar dan simbol dari jenis-jenis dioda:

1. Dioda Silicon Terbuat dari bahan Germanium, memiliki drop tegangan maju (forward volt drop) 0,7V, pada rangkaian elektronika biasa dipakai sebagai penyearah (rectifier). Contoh dioda Germanium adalah: 1N4000 series dan 1N5000 series dll.
2. Dioda Germanium Terbuat dari bahan Silicon, memiliki drop tegangan maju (forward volt drop) 0,3V. Biasa diaplikasikan sebagai dioda penyearah. contoh dioda silicon adalah: IN4148 atau 1N914 dll.
3. Dioda Zener Terbuat dari bahan silikon, dioda zener atau sering disebut juga "breakdown diode" berfungsi sebagai pembatas tegangan pada rangkaian, atau dengan kata lain dioda zener adalah komponen regulator tegangan sederhana. dioda zener memiliki rating tegangan antara 1 sampai ratusan volt dengan daya mulai dari 1/4w.
4. Light Emitting Diode atau LED Adalah jenis dioda yang dapat mengeluarkan cahaya, LED yang banyak dipasaran berbentuk kubah bulat dan juga kotak persegi dengan variasi warna merah, kuning, hijau, biru atau putih. batas arus maksimum LED adalah 20mA. dan memiliki drop tegangan maju (forward volt drop) antara 1,2v sampai 3,6v tergantung dari jenis warna LED.
5. Dioda Schottky disebut juga dioda power memiliki drop tegangan maju (forward bias) yang rendah, namun rating arus dan tegangannya tinggi. Biasa dipakai sebagai penyearah pada frekuensi tinggi, sering dipakai pada rangkaian pengisian battre, AC Rectifier dan Inverter.contoh untuk dioda schotky adalah 5819 atau 58xx dll.
3. Transistor
Transistor adalah komponen semikonduktor yang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, modulasi sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam kran listrik, di mana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Transistor Bipolar adalah salah satu jenis transistor yang terbentuk dari 2 dioda sehingga memiliki polaritas atau sisi positif dan sisi negatif. Biasanya transistor Bipolar atau disebut dengan BJT (Basis Junction Transistor) memiliki 2 jenis, diantaranya yaitu Transistor PNP dan Transistor NPN. Transistor ini memiliki 3 polaritas yang biasa disebut B (Basis), E (Emiter), C (Collector). Basis berfungsi sebagai base atau tempat berkumpulnya kumpulan aliran arus yang masuk ke transistor, Emiter dan Collector sebagai aliran arus masuk dan keluar.
Transistor yang digunakan pada tugas besar ini adalah:
. Fixed Bias
Fixed bias pada transistor BJT adalah metode yang sangat sederhana di mana tegangan basis transistor ditetapkan oleh sumber tegangan eksternal melalui sebuah resistor basis (RB). Konfigurasi dasar rangkaian ini melibatkan tegangan suplai (VCC), resistor kolektor (RC), dan resistor basis yang terhubung ke sumber tegangan bias (VBB). Kelebihan dari metode ini adalah kesederhanaannya, namun kelemahannya adalah stabilitas yang rendah. Fixed bias sangat sensitif terhadap variasi parameter transistor seperti β (gain) dan perubahan suhu, sehingga titik kerja transistor dapat mudah bergeser. Gambar Rangkaian Fixed Bias
Gambar Rangkaian Fixed Bias
 Rumus Untuk Rangkaian Fixed Bias
Rumus Untuk Rangkaian Fixed Bias
2. Self BiasSelf bias meningkatkan stabilitas dengan menambahkan resistor emitor (RE) yang memberikan umpan balik negatif. Dalam konfigurasi self bias, tegangan basis diatur melalui resistor basis (RB) dan tegangan pada emitor yang dikendalikan oleh arus emitor (IE) yang mengalir melalui RE. Ini membantu menstabilkan arus kolektor (IC) karena perubahan dalam arus kolektor akan mempengaruhi tegangan emitor dan, pada gilirannya, menyesuaikan tegangan basis-emitor (VBE). Metode ini menawarkan stabilitas yang lebih baik dibandingkan fixed bias, tetapi masih relatif sederhana.
 Gambar Rangkaian Self Bias
Gambar Rangkaian Self Bias
 Rumus untuk Rangkaian Self Bias
Rumus untuk Rangkaian Self Bias
3. Emitter BiasEmitter bias menggabungkan pembagi tegangan untuk basis dan resistor emitor untuk mencapai stabilitas yang lebih tinggi. Konfigurasi ini melibatkan dua resistor pembagi tegangan (RB1 dan RB2) yang menetapkan tegangan basis, serta resistor emitor (RE) yang menyediakan umpan balik negatif. Pembagi tegangan memastikan tegangan basis tetap stabil meskipun ada perubahan dalam tegangan suplai atau parameter transistor. Sementara itu, resistor emitor menambah stabilitas termal dengan mengurangi efek perubahan suhu pada arus kolektor. Emitter bias adalah metode yang sangat stabil dan cocok untuk aplikasi yang memerlukan titik kerja yang sangat stabil.
 Gambar Rangkaian Emitter Bias
Gambar Rangkaian Emitter Bias
 Rumus untuk Rangkaian Emitter Bias
Rumus untuk Rangkaian Emitter Bias
4. Voltage Divider Bias Voltage divider bias adalah salah satu teknik biasing yang digunakan pada transistor bipolar junction (BJT) atau transistor efek medan (FET) untuk memastikan operasi yang stabil dan memperbaiki titik kerja transistor. Teknik ini sering digunakan dalam rangkaian penguat (amplifier) karena kemampuannya untuk menghasilkan tegangan bias yang relatif stabil terhadap variasi parameter transistor dan variasi tegangan suplai.
1. Dioda Silicon






Voltage divider bias adalah salah satu teknik biasing yang digunakan pada transistor bipolar junction (BJT) atau transistor efek medan (FET) untuk memastikan operasi yang stabil dan memperbaiki titik kerja transistor. Teknik ini sering digunakan dalam rangkaian penguat (amplifier) karena kemampuannya untuk menghasilkan tegangan bias yang relatif stabil terhadap variasi parameter transistor dan variasi tegangan suplai.
Prinsip Kerja Voltage Divider Bias
Resistor Pembagi Tegangan:
- Dua resistor (R1 dan R2) digunakan untuk membentuk pembagi tegangan.
- Kedua resistor ini dihubungkan secara seri antara suplai tegangan (Vcc) dan ground.
- Tegangan di titik tengah pembagi tegangan ini digunakan sebagai tegangan bias basis (Vb) untuk transistor.
.png)
.png)
.png)
Lambang Transistor BJT

Sudah jelas seperti gambar di atas bahwa transistor PNP memiliki simbol yang arah panahnya masuk dan sebaliknya untuk NPN arah panah dari emiter mengarah keluar.
Bentuk aliran arus pada sebuah transistor dapat dirumuskan dengan hukum KCL ( Kirchoff Current Law) Atau hukum Kirchoff I, yang dirumuskan sebagai berikut.
Ie = Ic + Ib
Keterangan :
Ie = Arus Emitter
Ic = Arus Collector
Ib = Arus Basis
Pada Transistor BJT nilai arus Ib relatif sangat kecil terhadap Ic, maka Ib ini dapat diabaikan. Sehingga persamaan diatas bisa berubah menjadi
Ie = Ic
Keterangan :
Ie = Arus Emitter
Ic = Arus Collector
Karakteristik input merupakan karakteristik dari tegangan base dan emitter (VBE) sebagai fungsi arus base (IB) dengan VCE dalam keadaan konstan. Karakteristik ini merupakan karakteristik dari junction emitter-base dengan forward bias atau sama dengan karakteristik diode pada forward bias. Pada BJT seluruh pembawa muatan akan melewati junction Base-Emittor menuju Collector maka arus pada basis menjadi jauh lebih kecil dari diode P-N dengan adanya faktor hfe. Penambahan nilai VCE megakibatkan arus IB akan berkurang. Arus IB akan mengalir jika tegangan VBE > 0,7 V
Karakteristik output merupakan karakteristik dengan tegangan emitter (VCE) sebagai fungsi arus kolektor (IC) terhadap arus base (IB) yang tetap seperti ditunjukkan pada Gambar 4. Pada saat IB=0, arus IC yang mengalir adalah arus bocor ICB0 (pada umumnya diabaikan), sedangkan pada saat IB ≠ 0 untuk VCE kecil (<< 0,2 V), pembawa muatan di basis tidak efisien dan transistor dikatakan dalam keadaan saturasi dengan IB > IC / hfe . Pada saat VCE diperbesar IC pun naik hingga melewati level tegangan VCE saturasi (0,2 -1 V) hingga transistor bekerja dalam daerah aktif dengan IB = IC / hfe. Pada saat ini kondisi arus IC relatif konstan terhadap variasi tegangan VCE.
Gelombang input dan output transistor

4. Op-amp LM741
Resistor Pembagi Tegangan:
- Dua resistor (R1 dan R2) digunakan untuk membentuk pembagi tegangan.
- Kedua resistor ini dihubungkan secara seri antara suplai tegangan (Vcc) dan ground.
- Tegangan di titik tengah pembagi tegangan ini digunakan sebagai tegangan bias basis (Vb) untuk transistor.
.png)
.png)
.png)
Ie = Ic + Ib
Keterangan :
Ie = Arus Emitter
Ic = Arus Collector
Ib = Arus Basis
Keterangan :
Ie = Arus Emitter
Ic = Arus Collector
4. Op-amp LM741
Penguat operasional atau yang dikenal sebagai Op-Amp merupakan suatu rangkaian terintegrasi atau IC yang memiliki fungsi sebagai penguat sinyal, dengan beberapa konfigurasi. Secara ideal Op-Amp memiliki impedansi masukan dan penguatan yang tak berhingga serta impedansi keluaran sama dengan nol. Dalam prakteknya, Op-Amp memiliki impedansi masukan dan penguatan yang besar serta impedansi keluaran yang kecil.
Op-Amp memiliki beberapa karakteristik, di antaranya:
a. Penguat tegangan tak berhingga (AV = ∼)
b. Impedansi input tak berhingga (rin = ∼)
c. Impedansi output nol (ro = 0) d. Bandwidth tak berhingga (BW = ∼)
d. Tegangan offset nol pada tegangan input (Eo = 0 untuk Ein = 0)
Rangkaian dasar Op-Amp


Op Amp IC 741 adalah sirkuit terpadu monolitik, yang terdiri dari Penguat Operasional tujuan umum. Ini pertama kali diproduksi oleh semikonduktor Fairchild pada tahun 1963. Angka 741 menunjukkan bahwa IC penguat operasional ini memiliki 7 pin fungsional, 4 pin yang mampu menerima input dan 1 pin output.
Op Amp IC 741 dapat memberikan penguatan tegangan tinggi dan dapat dioperasikan pada rentang tegangan yang luas, yang menjadikannya pilihan terbaik untuk digunakan dalam integrator, penguat penjumlahan, dan aplikasi umpan balik umum. Ini juga dilengkapi perlindungan hubung singkat dan sirkuit kompensasi frekuensi internal yang terpasang di dalamnya.
Konfigurasi PIN

Spesifikasi:


Respons karakteristik kurva I-O:

Jenis Op Amp yang di pakai untuk tugas besar line follower adalah :1. Detektor non inverting Vref= +Rangkaian detektor inverting dengan tegangan input Vi berupa gelombang segitiga dan tegangan referensi Vref > 0 Volt adalah seperti gambar 69

Dengan menggunakan persamaan (1) maka Vi = V2 dan Vref = V1 sehingga bentuk gelombang tegangan output Vo ( .( ) 1 2 (max) Vo AOL V V ) yang dihasilkan adalah seperti gambar 70 Gambar 70 Bentuk gelombang input dan gelombang output Adapun kurva karakteristik Input-Ouput (I-O) adalah seperti gambar 71. Dengan Vi > Vref maka Vo = -Vsat dan sebaliknya bila Vi < Vref maka Vo = +Vsat.
Gambar 70 Bentuk gelombang input dan gelombang output Adapun kurva karakteristik Input-Ouput (I-O) adalah seperti gambar 71. Dengan Vi > Vref maka Vo = -Vsat dan sebaliknya bila Vi < Vref maka Vo = +Vsat.
2. Detektor Non Inverting dengan vref =+Rangkaian detektor non inverting dengan tegangan input Vi berupa gelombang segitiga dan tegangan referensi Vref > 0 Volt adalah seperti gambar 78

Gambar 78 Rangkaian detektor non inverting Dengan menggunakan persamaan (1) maka Vi = V1 dan +Vref = V2 sehingga bentuk gelombang tegangan output Vo ( .( ) 1 2 (max) Vo Vsat AOL V V ) yang dihasilkan dengan simulasi multisim adalah seperti

3. Voltage FollowerRangkaian voltage follower atau buf er dimana ACL = 1, adalah seperti pada gambar 129.
Syarat op-amp ideal adalah Ed = 0 maka VO = Vi sehingga 1 i CL V Vo A Bentuk gelombang tegangan input dan gelombang tegangan output adalah sama karena ACL = 1 dan sefasa karena Vi diinputkan ke kaki non inverting seperti pada gambar 130 dan kurva karakteristik I-O seperti


4. non inverting adder amplifierRangkaian non inverting adder amplifier (pembalik) adalah seperti gambar 127.
Gambar 127 Rangkaian non inverting adder amplifier Dari gambar 127 dengan memakai metoda loop tertutup untuk mencari arus loop sehingga bisa dicari tegangan input Vi. Syarat op-amp ideal adalah Ed = 0 sehingga VA = Vi maka,



5. Non inverting amplifierRangkaian non inverting amplifier (tidak membalik) adalah seperti gambar 122, input dimasukkan ke kaki non inverting sehingga tegangan output yang dihasilkan sefasa dengan tegangan input. Untuk mencari turunan penguatan tegangan ACL maka rangkaian dimisalkan dahulu dengan input dc positif, seperti gambar 123.

Op-Amp memiliki beberapa karakteristik, di antaranya:
a. Penguat tegangan tak berhingga (AV = ∼)
b. Impedansi input tak berhingga (rin = ∼)
c. Impedansi output nol (ro = 0) d. Bandwidth tak berhingga (BW = ∼)
d. Tegangan offset nol pada tegangan input (Eo = 0 untuk Ein = 0)
Rangkaian dasar Op-Amp


Op Amp IC 741 adalah sirkuit terpadu monolitik, yang terdiri dari Penguat Operasional tujuan umum. Ini pertama kali diproduksi oleh semikonduktor Fairchild pada tahun 1963. Angka 741 menunjukkan bahwa IC penguat operasional ini memiliki 7 pin fungsional, 4 pin yang mampu menerima input dan 1 pin output.
Op Amp IC 741 dapat memberikan penguatan tegangan tinggi dan dapat dioperasikan pada rentang tegangan yang luas, yang menjadikannya pilihan terbaik untuk digunakan dalam integrator, penguat penjumlahan, dan aplikasi umpan balik umum. Ini juga dilengkapi perlindungan hubung singkat dan sirkuit kompensasi frekuensi internal yang terpasang di dalamnya.
Konfigurasi PIN

Spesifikasi:


Respons karakteristik kurva I-O:















5. Relay
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Simbol di proteus

6. Ground
Suatu komponen listrik yang bisa meniadakan beda potensial sebagai pelepasan muatan listrik berlebih pada suatu instalasi listrik dengan cara mengalirkannya ke tanah.
Simbol di proteus

7. Power Supply
Catu daya merupakan suatu Rangkaian yang paling penting bagi sistem elektronika. Power supply atau catu daya adalah suatu alat atau perangkat elektronik yang berfungsi untuk merubah arus AC menjadi arus DC untuk memberi daya suatu perangkat keras lainnya. Sumber AC yaitu sumber tegangan bolak-balik, sedangkan sumber tegangan DC merupakan sumber tegangan searah. Power supply/unit catu daya secara efektif harus mengisolasi rangkaian internal dari jaringan utama, dan biasanya harus dilengkapi dengan pembatas arus otomatis atau pemutus bila terjadi beban lebih atau hubung singkat. Bila pada saat terjadinya kesalahan catu daya, tegangan keluaran DC meningkat di atas suatu nilai aman maksimum untuk rangkaian internal, maka daya secara otomatis harus diputuskan.
Simbol di proteus

8. LDR
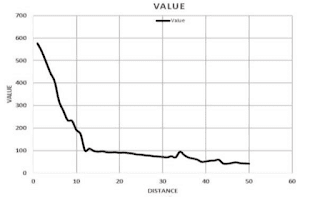
LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenai sensor ini. LDR juga dapat digunakan sebagai sensor cahaya. Perlu diketahui bahwa nilai resistansi dari sensor ini sangat bergantung pada intensitas cahaya. Semakin banyak cahaya yang mengenainya, maka akan semakin menurun nilai resistansinya. Sebaliknya jika semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai hambatannya akan menjadi semakin besar sehingga arus listrik yang mengalir akan terhambat.
LDR di proteus

Grafik respon
9. Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/directunidirectional.
Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda (double pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Kecepatan putar motor DC (N) dirumuskan dengan Persamaan berikut.

Simbol motor DC di proteus:

Catu daya merupakan suatu Rangkaian yang paling penting bagi sistem elektronika. Power supply atau catu daya adalah suatu alat atau perangkat elektronik yang berfungsi untuk merubah arus AC menjadi arus DC untuk memberi daya suatu perangkat keras lainnya. Sumber AC yaitu sumber tegangan bolak-balik, sedangkan sumber tegangan DC merupakan sumber tegangan searah. Power supply/unit catu daya secara efektif harus mengisolasi rangkaian internal dari jaringan utama, dan biasanya harus dilengkapi dengan pembatas arus otomatis atau pemutus bila terjadi beban lebih atau hubung singkat. Bila pada saat terjadinya kesalahan catu daya, tegangan keluaran DC meningkat di atas suatu nilai aman maksimum untuk rangkaian internal, maka daya secara otomatis harus diputuskan.
Simbol di proteus
10. Sensor Touch
Merupakan sensor yang mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai Sensor Taktil.

Pin Out

Spesifikasi

Grafik Respon Sensor Touch

Dapat dilihat bahwa pada grafik di atas saat sentuhan terdeteksi maka signal touch akan muncul.
11. Sensor Jarak
Merupakan sensor yang mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai Sensor Taktil.
Pin Out
Spesifikasi
Grafik Respon Sensor Touch
Dapat dilihat bahwa pada grafik di atas saat sentuhan terdeteksi maka signal touch akan muncul.
11. Sensor Jarak
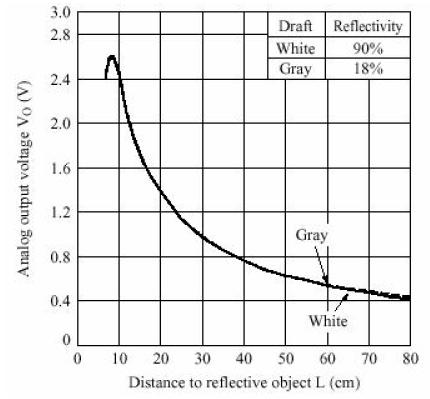
Sensor analog jarak adalah perangkat elektronik yang mendeteksi atau mengukur jarak antara sensor tersebut dengan objek atau permukaan tertentu dengan menggunakan prinsip-prinsip analog elektronik. Sensor ini menghasilkan keluaran yang berupa sinyal analog yang berubah seiring dengan perubahan jarak antara sensor dan objek yang diukur.
Prinsip kerja umum dari sensor analog jarak bisa bervariasi tergantung pada teknologi yang digunakan, seperti penggunaan gelombang ultrasonik, inframerah, atau laser. Contoh sensor analog jarak meliputi sensor ultrasonik yang mengukur waktu pantulan gelombang suara untuk menghitung jarak, sensor inframerah yang mengukur intensitas cahaya inframerah yang dipantulkan, atau sensor laser yang menggunakan sumber cahaya laser untuk mengukur jarak dengan akurasi tinggi.
Keluaran dari sensor analog jarak umumnya berupa tegangan atau arus listrik yang proporsional dengan jarak yang diukur. Informasi jarak ini kemudian dapat digunakan dalam berbagai aplikasi seperti sistem navigasi otomatis, pengukuran industri, atau perangkat keamanan.
Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima.
5. Percobaan[kembali]
vA). Langkah Langkah Percobaan
- Siapkan alat dan bahan (IR Obstacle, Pot-hg, potensiometer, resistor, ground, transistor, opamp, power supply, lamp)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan baterai ke IR dan op amp
- Lalu sambungkan output IR ke kaki op amp
- Lalu sambungkan kaki op amp satu lagi ke potensiometer
- Lalu sambungkan op amp ke resistor
- Lalu sambungkan resistor ke transistor
- Lalu sambungkan transistor ke relay kaki relay
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
- Siapkan alat dan bahan (LDR, pot-hg, potensiometer, dioda, baterai, resistor, ground, transistor, opamp, power supply, motor DC)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan potensiometer ke kaki inverting op amp
- Lalu sambungkan LDR ke kaki non inverting op amp
- Lalu sambungkan op amp ke transistor
- Lalu sambungkan kaki relay ke collector transistor
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor Dc
- Lalu sambungkan motor Dc ke relay
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
- Siapkan alat dan bahan (flame sensor, potensiometer, dioda, baterai, resistor, ground, transistor, opamp, power supply, motor DC)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan pot yang diatasnya power dan dibawahnya ground ke testpin pada sensor
- Lalu sambungkan ground ke GND pada sensor
- Lalu sambungkan generator dc ke Vcc pada sensor
- Lalu sambungkan induktor ke out pada sensor
- Lalu sambungkan induktor ke kapasitor
- Lalu sambungkan induktor ke resistor
- Lalu sambungkan resistor ke kaki inverting opamp detektor
- Lalu sambungkan ke resistor
- Lalu sambungkan resistor ke transistor
- Lalu sambungkan transistor ke dioda
- Lalu sambungkan dioda ke relay
- Lalu sambungkan kaki relay ke baterai dan fan
- Lalu sambungkan ground di bawah rangkaian
- Kemudian masukkan library ke sensor
- Jalankan simulasinya
- Siapkan alat dan bahan (Touch sensor, potensiometer, resistor, ground, transistor, opamp, power supply, lamp)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan power supply ke touch sensor
- Lalu sambungkan output touch sensor ke kaki op amp
- Lalu sambungkan kaki op amp satu lagi ke potensiometer
- Lalu sambungkan op amp ke resistor
- Lalu sambungkan resistor ke transistor
- Lalu sambungkan transistor ke relay kaki relay
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
- Siapkan alat dan bahan (GP2D12, potensiometer, dioda, baterai, resistor, ground, transistor, opamp, power supply, motor DC)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan potensiometer ke kaki non inverting op amp
- Lalu sambungkan GP2D12 ke kaki inverting op amp
- Lalu sambungkan op amp ke transistor
- Lalu sambungkan kaki relay ke collector transistor
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor Dc
- Lalu sambungkan motor Dc ke relay
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
Robot line follower adalah robot yang dapat bergerak mengikuti garis yang membentuk suatu lintasan, dimana garis umunya berwarna hitam
.png)
Sensor Infrared
.png)
(PRINSIP KERJA) Ketika sensor infrared mendeteksi adanya garis maka . Tegangan akan masuk menuju kaki non inverting sebesar 5 volt, dibandingkan dengan tegangan di potensiometer Vo = ED x AOL, AOLnya sangat besar, sekitar 200.000 dan ED = kaki non inverting – kaki inverting= 5 - 3,7 = 1,3, jadi Vo= 1,3 x sangat besar = 11 atau plus saturasi, kemudian tegangan diumpankan ke R4, sehingga mengalir arus ke transistor pada rangkaian fixed bias, kemudian transistornya on, karena tegangan VBEnya besar dari 0,7 yaitu 0,83 dan transistornya on maka ada arus dari suplay 15 volt lewat relay masuk ke kaki collector terus ke emitor dan terakhir ke ground, dan ada juga arus mengalir ke R3 lalu ke base lalu ke emitor dan berakhir di ground, karna relay dapat arus maka switchnya berpindah kekiri, maka suplay bisa mengaktifkan motor DC.
Sensor Touch
.png)
Sensor Cahaya
.png)
(PRINSIP KERJA) Ketika sensor mendeteksi tidak adanya cahaya maka, . Tegangan akan masuk menuju kaki non inverting sebesar 4,95 volt, dibandingkan dengan tegangan di potensiometer Vo = ED x AOL, AOLnya sangat besar, ED = kaki non inverting – kaki inverting= 5 - 3,7 = 1,3, jadi Vo= 1,3 x sangat besar = 11 atau plus saturasi, diteruskan ke R2, diterukasn ke transistor, transistornya on tegangan VBEnya 0,81 atau 0,7, karna transistornya on maka ada arus dari suplay 5 volt lewat relay masuk ke kaki collector terus ke emitor dan trakhir ke ground,dan ada juga arus mengalir ke R8 lalu ke base lalu ke emitor dan berakhir di ground, karna relay dapat arusmaka switchnya berpindah kekiri, maka suplay bisa menghidupkan lampu
Sensor Jarak
.png)
Sensor Flame
.png)
(PRINSIP KERJA) Ketika sensor mendeteksi adanyaapi, sensor akan aktif ditandai dengan logic state berlogika 1. Kemudian Tegangan akan masuk menuju kaki non inverting sebesar 5 volt, dibandingkan dengan tegangan di potensiometer Vo = ED x AOL, AOLnya sangat besar, ED = kaki non inverting – kaki inverting= 5 - 3,7 = 1,3, jadi Vo= 1,3 x sangat besar = 11 atau plus saturasi, diteruskan ke R9, diterukasn ke transistor, transistornya on tegangan VBEnya 0,83 atau > 0,7, karna transistornya on maka ada arus dari suplay 15 volt lewat relay masuk ke kaki collector terus ke emitor dan trakhir ke ground,dan ada juga arus mengalir ke RB lalu ke base lalu ke emitor dan berakhir di ground, karna relay dapat arusmaka switchnya berpindah kekiri, maka suplay bisa memutus arus sehingga roda berhenti
5. Percobaan[kembali]
vA). Langkah Langkah Percobaan
- Siapkan alat dan bahan (IR Obstacle, Pot-hg, potensiometer, resistor, ground, transistor, opamp, power supply, lamp)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan baterai ke IR dan op amp
- Lalu sambungkan output IR ke kaki op amp
- Lalu sambungkan kaki op amp satu lagi ke potensiometer
- Lalu sambungkan op amp ke resistor
- Lalu sambungkan resistor ke transistor
- Lalu sambungkan transistor ke relay kaki relay
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
- Siapkan alat dan bahan (LDR, pot-hg, potensiometer, dioda, baterai, resistor, ground, transistor, opamp, power supply, motor DC)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan potensiometer ke kaki inverting op amp
- Lalu sambungkan LDR ke kaki non inverting op amp
- Lalu sambungkan op amp ke transistor
- Lalu sambungkan kaki relay ke collector transistor
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor Dc
- Lalu sambungkan motor Dc ke relay
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
- Siapkan alat dan bahan (flame sensor, potensiometer, dioda, baterai, resistor, ground, transistor, opamp, power supply, motor DC)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan pot yang diatasnya power dan dibawahnya ground ke testpin pada sensor
- Lalu sambungkan ground ke GND pada sensor
- Lalu sambungkan generator dc ke Vcc pada sensor
- Lalu sambungkan induktor ke out pada sensor
- Lalu sambungkan induktor ke kapasitor
- Lalu sambungkan induktor ke resistor
- Lalu sambungkan resistor ke kaki inverting opamp detektor
- Lalu sambungkan ke resistor
- Lalu sambungkan resistor ke transistor
- Lalu sambungkan transistor ke dioda
- Lalu sambungkan dioda ke relay
- Lalu sambungkan kaki relay ke baterai dan fan
- Lalu sambungkan ground di bawah rangkaian
- Kemudian masukkan library ke sensor
- Jalankan simulasinya
- Siapkan alat dan bahan (Touch sensor, potensiometer, resistor, ground, transistor, opamp, power supply, lamp)
- Letakkan alat dan bahan tersebut, seperti gambar rangkaian
- Lalu sambungkan power supply ke touch sensor
- Lalu sambungkan output touch sensor ke kaki op amp
- Lalu sambungkan kaki op amp satu lagi ke potensiometer
- Lalu sambungkan op amp ke resistor
- Lalu sambungkan resistor ke transistor
- Lalu sambungkan transistor ke relay kaki relay
- Lalu sambungkan relay ke baterai
- Lalu sambungkan baterai ke motor
- Lalu sambungkan ground di bawah rangkaian
- Jalankan simulasinya
Sensor analog jarak adalah perangkat elektronik yang mendeteksi atau mengukur jarak antara sensor tersebut dengan objek atau permukaan tertentu dengan menggunakan prinsip-prinsip analog elektronik. Sensor ini menghasilkan keluaran yang berupa sinyal analog yang berubah seiring dengan perubahan jarak antara sensor dan objek yang diukur.
Prinsip kerja umum dari sensor analog jarak bisa bervariasi tergantung pada teknologi yang digunakan, seperti penggunaan gelombang ultrasonik, inframerah, atau laser. Contoh sensor analog jarak meliputi sensor ultrasonik yang mengukur waktu pantulan gelombang suara untuk menghitung jarak, sensor inframerah yang mengukur intensitas cahaya inframerah yang dipantulkan, atau sensor laser yang menggunakan sumber cahaya laser untuk mengukur jarak dengan akurasi tinggi.
Keluaran dari sensor analog jarak umumnya berupa tegangan atau arus listrik yang proporsional dengan jarak yang diukur. Informasi jarak ini kemudian dapat digunakan dalam berbagai aplikasi seperti sistem navigasi otomatis, pengukuran industri, atau perangkat keamanan.
Robot line follower adalah robot yang dapat bergerak mengikuti garis yang membentuk suatu lintasan, dimana garis umunya berwarna hitam
Sensor Infrared
(PRINSIP KERJA) Ketika sensor infrared mendeteksi adanya garis maka . Tegangan akan masuk menuju kaki non inverting sebesar 5 volt, dibandingkan dengan tegangan di potensiometer Vo = ED x AOL, AOLnya sangat besar, sekitar 200.000 dan ED = kaki non inverting – kaki inverting= 5 - 3,7 = 1,3, jadi Vo= 1,3 x sangat besar = 11 atau plus saturasi, kemudian tegangan diumpankan ke R4, sehingga mengalir arus ke transistor pada rangkaian fixed bias, kemudian transistornya on, karena tegangan VBEnya besar dari 0,7 yaitu 0,83 dan transistornya on maka ada arus dari suplay 15 volt lewat relay masuk ke kaki collector terus ke emitor dan terakhir ke ground, dan ada juga arus mengalir ke R3 lalu ke base lalu ke emitor dan berakhir di ground, karna relay dapat arus maka switchnya berpindah kekiri, maka suplay bisa mengaktifkan motor DC.
Sensor Touch
Sensor Cahaya
(PRINSIP KERJA) Ketika sensor mendeteksi tidak adanya cahaya maka, . Tegangan akan masuk menuju kaki non inverting sebesar 4,95 volt, dibandingkan dengan tegangan di potensiometer Vo = ED x AOL, AOLnya sangat besar, ED = kaki non inverting – kaki inverting= 5 - 3,7 = 1,3, jadi Vo= 1,3 x sangat besar = 11 atau plus saturasi, diteruskan ke R2, diterukasn ke transistor, transistornya on tegangan VBEnya 0,81 atau 0,7, karna transistornya on maka ada arus dari suplay 5 volt lewat relay masuk ke kaki collector terus ke emitor dan trakhir ke ground,dan ada juga arus mengalir ke R8 lalu ke base lalu ke emitor dan berakhir di ground, karna relay dapat arusmaka switchnya berpindah kekiri, maka suplay bisa menghidupkan lampu
Sensor Jarak
Sensor Flame
(PRINSIP KERJA) Ketika sensor mendeteksi adanyaapi, sensor akan aktif ditandai dengan logic state berlogika 1. Kemudian Tegangan akan masuk menuju kaki non inverting sebesar 5 volt, dibandingkan dengan tegangan di potensiometer Vo = ED x AOL, AOLnya sangat besar, ED = kaki non inverting – kaki inverting= 5 - 3,7 = 1,3, jadi Vo= 1,3 x sangat besar = 11 atau plus saturasi, diteruskan ke R9, diterukasn ke transistor, transistornya on tegangan VBEnya 0,83 atau > 0,7, karna transistornya on maka ada arus dari suplay 15 volt lewat relay masuk ke kaki collector terus ke emitor dan trakhir ke ground,dan ada juga arus mengalir ke RB lalu ke base lalu ke emitor dan berakhir di ground, karna relay dapat arusmaka switchnya berpindah kekiri, maka suplay bisa memutus arus sehingga roda berhenti
6. Video[kembali]
1. LDR Sensor
3. Sensor Touch
5. Sensor Flame
7. Download File[kembali]

{kind=link}
Komentar
Posting Komentar